2026年可载人变形机甲机器人 MOSFET深度选型方案
2026-06-11
前言:从人形机器人迈向“可载人机甲”时代
2026年,机器人产业正在从传统工业机械臂、人形机器人,进一步向“可载人变形机甲机器人”方向演进。随着高功率密度电驱系统、AI实时运动控制、轻量化复合材料以及高能量密度电池平台的发展,具备载人能力、动态变形能力以及复杂地形适应能力的新一代机甲机器人,已经逐渐从概念验证进入工程化阶段。
与传统机器人相比,可载人机甲平台最大的区别在于:
功率等级显著提升
关节冲击载荷更高
动态稳定控制更复杂
电源系统趋向“移动储能平台化”
高频AI运算与实时控制功耗激增
安全冗余要求接近新能源汽车与航空电子级别
在整个平台中,MOSFET已经不仅仅是“开关器件”,而是整个动力系统、供电系统、热管理系统以及安全控制系统的核心基础器件。
一台中大型GD01类可载人变形机甲,其MOSFET总使用规模已经达到400~800颗,接近小型新能源汽车与工业伺服平台的功率器件规模。
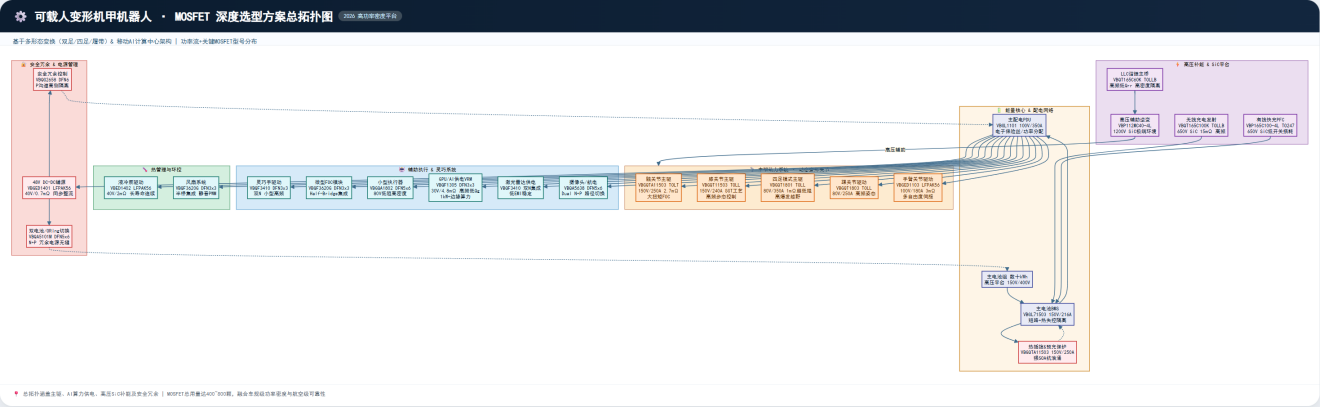
因此,如何针对不同系统模块进行MOSFET架构选型,已经成为机器人整机设计中的核心课题。为此,VBsemi分析并整理了可载人变形机甲机器人各模块中MOSFET的应用需求,并给出推荐参数,形成如下选型速查表,希望对工程师选型有所帮助。
-------------(图片一,位于文章底部位置)------------------------------------------------
可载人变形机甲机器人VBsemi MOSFET 选型速查表
系统模块:髋关节主驱 -------核心功能:大扭矩FOC驱动
推荐型号:VBGQTA11503----封装架构:TOLT-16
关键机器人级适配参数:150V/250A,2.7mΩ超低阻,适配重载动态冲击
预估使用数量:24~48颗
系统模块:膝关节主驱--------核心功能:高动态步态控制
推荐型号:VBGQT11503------封装架构:TOLL
关键机器人级适配参数:150V/240A,SGT工艺,低寄生适合高频伺服
预估使用数量:24~48颗
系统模块:四足模式主驱------核心功能:四足稳定运动控制
推荐型号:VBGQT1801 -------封装架构:TOLL
关键机器人级适配参数:80V/350A,1mΩ超低阻,适配高峰值爆发电流
预估使用数量:24~36颗
系统模块:踝关节驱动 --------核心功能:高频姿态调整
推荐型号:VBGQT1803--------封装架构:TOLL
关键机器人级适配参数:80V/250A,中低阻平衡效率与成本
预估使用数量:12~24颗
系统模块:手臂关节驱动 ------核心功能:多自由度伺服
推荐型号:VBGED1103--------封装架构:LFPAK56
关键机器人级适配参数:100V/180A,3mΩ,适合中功率机器人关节
预估使用数量:24~48颗
系统模块:小型执行器---------核心功能:灵巧动作控制
推荐型号:VBGQA1802--------封装架构:DFN8(5x6)
关键机器人级适配参数:80V低阻,高功率密度适合小型FOC
预估使用数量:20~60颗
系统模块:灵巧手驱动---------核心功能:微型伺服控制
推荐型号:VBQF3410----------封装架构:DFN8(3x3)
关键机器人级适配参数:双N结构,适合小型高频电机驱动
预估使用数量:20~80颗
系统模块:微型FOC模块--------核心功能:手指/云台/风扇
推荐型号:VBQF3620G---------封装架构:DFN8(3x3)
关键机器人级适配参数:Half-Bridge集成,降低驱动复杂度
预估使用数量:20~100颗
系统模块:主电池BMS----------核心功能:电池保护开关
推荐型号:VBGL71503 ---------封装架构:TO263-7L
关键机器人级适配参数:150V/216A,高可靠性适配机器人电池平台
预估使用数量:6~12颗
系统模块:主配电PDU----------核心功能:母线功率分配
推荐型号:VBGL1101-----------封装架构:TO263
关键机器人级适配参数:100V/350A,大电流适合电子保险丝
预估使用数量:6~16颗
系统模块:热插拔保护-----------核心功能:预充/浪涌保护
推荐型号:VBGQTA11503 -------封装架构:TOLT-16
关键机器人级适配参数:强SOA能力,应对机器人再生尖峰
预估使用数量:4~12颗
系统模块:48V DC-DC-----------核心功能:辅助能源转换
推荐型号:VBGED1401----------封装架构:LFPAK56
关键机器人级适配参数:40V/0.7mΩ,高频同步整流优化
预估使用数量:20~60颗
系统模块:GPU/AI供电----------核心功能:高算力VRM
推荐型号:VBQF1305 -----------封装架构:DFN8(3x3)
关键机器人级适配参数:30V/4.8mΩ,低寄生适合高频Buck
预估使用数量:30~120颗
系统模块:激光雷达供电---------核心功能:传感器稳定供电
推荐型号:VBQF3410------------封装架构:DFN8(3x3)
关键机器人级适配参数:双MOS集成,降低EMI与面积
预估使用数量:8~20颗
系统模块:摄像头/航电控制------核心功能:低压逻辑电源
推荐型号:VBQA5638------------封装架构:DFN8(5x6)
关键机器人级适配参数:Dual N+P结构,适合电源路径切换
预估使用数量:10~30颗
系统模块:液冷泵驱动------------核心功能:热管理循环系统
推荐型号:VBED1402 ------------封装架构:LFPAK56
关键机器人级适配参数:40V/2mΩ,长寿命连续运行优化
预估使用数量:4~12颗
系统模块:风扇系统 --------------核心功能:散热风道控制
推荐型号:VBQF3620G -----------封装架构:DFN8(3x3)
关键机器人级适配参数:半桥集成,适合静音PWM驱动
预估使用数量:8~24颗
系统模块:无线充电发射----------核心功能:高频谐振驱动
推荐型号:VBQT165C100K -------封装架构:TOLLB
关键机器人级适配参数:650V SiC/15mΩ,适配高频大功率无线充
预估使用数量:12~36颗
系统模块:有线快充PFC-----------核心功能:AC-DC功率因数校正
推荐型号:VBP165C100-4L-------封装架构:TO247-4L
关键机器人级适配参数:650V/100A,SiC工艺降低开关损耗
预估使用数量:4~12颗
系统模块:LLC谐振主桥-----------核心功能:高频隔离变换
推荐型号:VBQT165C60K---------封装架构:TOLLB
关键机器人级适配参数:高频低Qrr优化,适合高密度LLC
预估使用数量:8~24颗
系统模块:高压辅助逆变----------核心功能:特种高压电驱
推荐型号:VBP112MC40-4L ------封装架构:TO247-4L
关键机器人级适配参数:1200V SiC平台,适配极端高压环境
预估使用数量:2~6颗
系统模块:安全冗余控制 ----------核心功能:逻辑隔离/保护
推荐型号:VBQG2658-------------封装架构:DFN6(2x2)
关键机器人级适配参数:P沟道结构,适合高侧故障隔离
预估使用数量:10~40颗
系统模块:电源路径管理-----------核心功能:双电池切换/ORing
推荐型号:VBQA5101M------------封装架构:DFN8(5x6)
关键机器人级适配参数:双N+P结构,适合机器人冗余电源切换
预估使用数量:6~20颗
--------(图片二,位于文章底部位置)-------------------------
一、可载人变形机甲的功率系统特点
1.1 功率密度远高于传统人形机器人
普通双足机器人通常工作于24V~48V平台,峰值功率在数千瓦级别。而可载人机甲平台由于需要承载人体重量、装甲结构以及复杂运动机构,其核心驱动系统功率已经进入:
持续功率:20kW~80kW
峰值功率:100kW以上
瞬态爆发电流:数百安培
这意味着主驱MOSFET需要同时满足:超低导通电阻,极强SOA能力,高脉冲耐受能力,高频FOC适配能力,极低寄生参数
传统消费级MOSFET已无法满足需求,机器人主驱已经开始向新能源汽车电驱级器件靠拢。
-------------------------------------------------------------------------------------------
1.2 多形态变换带来的动态冲击
可载人变形机甲通常具备:双足模式,四足模式,履带辅助模式,高机动跳跃模式,重载稳定模式
不同形态之间的切换,会导致关节电流瞬态冲击极大。例如:
髋关节驱动会出现大惯量反灌电流
膝关节会产生高频扭矩脉冲
四足模式下会形成周期性大电流爆发
跳跃落地瞬间会形成极强再生尖峰
因此MOSFET除了低阻之外,更重要的是:雪崩能力,热循环寿命,高温稳定性,高频EMI控制能力
--------(图片三,位于文章底部位置)--------------------------------------------------
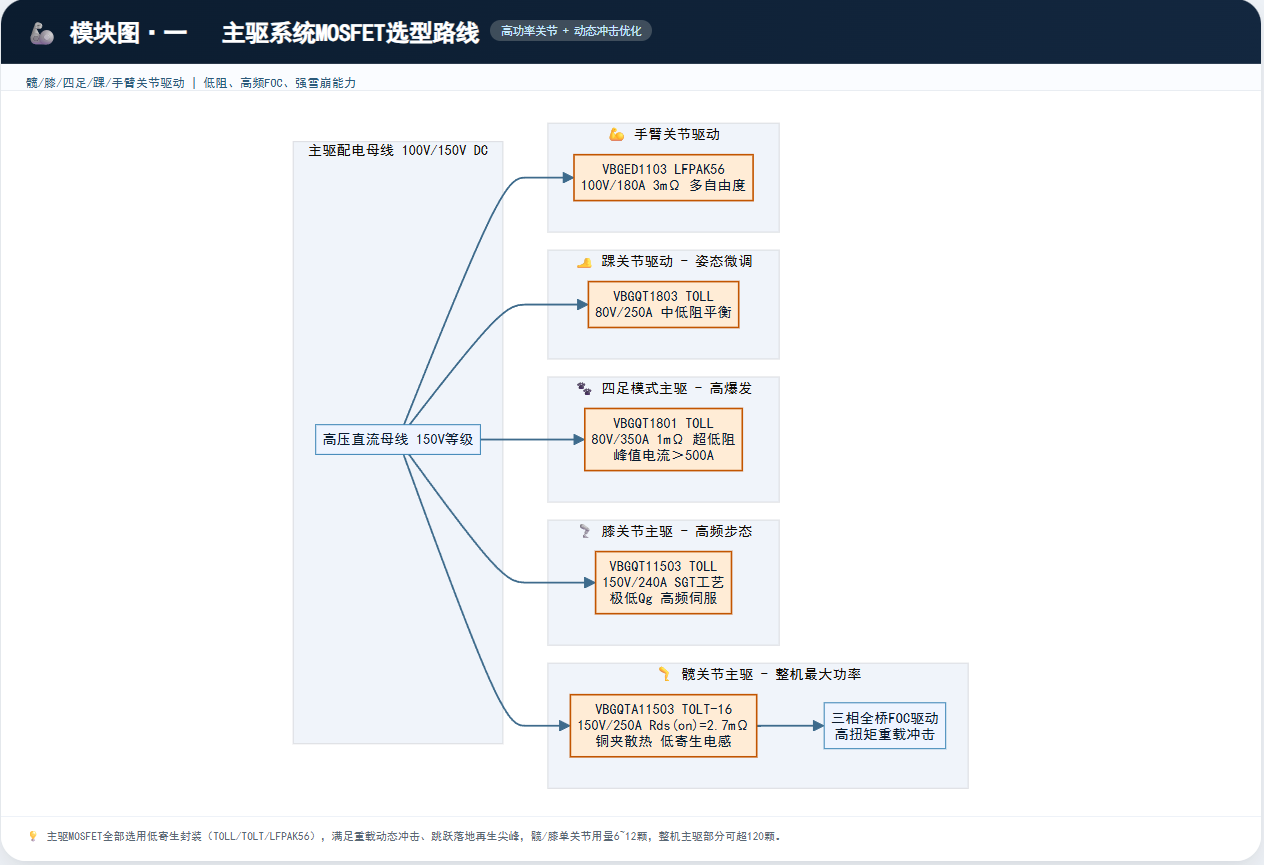
二、主驱系统MOSFET选型路线(图片四,位于文章底部位置)
2.1 髋关节主驱:平台最核心功率模块
髋关节是整机功率最大的执行机构之一。其特点包括:高扭矩输出,高惯量负载,长时间持续运行,动态重心平衡控制
推荐采用:VBGQTA11503,TOLT-16封装,150V/250A,2.7mΩ超低导通阻抗
TOLT封装相比传统TO封装:寄生电感更低,铜夹结构散热更强,高频稳定性更好,更适合高频FOC伺服驱动
在机甲平台中,髋关节通常采用三相全桥结构。
单关节MOSFET使用量通常达到:6~12颗
整机髋关节驱动MOSFET规模可达到:24~48颗
已经接近新能源汽车电驱系统规模。
-------------------------------------------------------------------------------------------------
2.2 膝关节驱动:高动态运动核心
膝关节需要承担:步态缓冲,高速屈伸,动态平衡调整,落地冲击吸收
其控制频率往往高于髋关节。因此对MOSFET提出更高要求:
更低Qg,更低寄生参数,更好的开关损耗控制,更高PWM频率适配能力
推荐型号:VBGQT11503,TOLL封装,150V/240A,SGT工艺
TOLL封装目前已经成为机器人主驱的重要趋势,其优势包括:PCB布局更紧凑,功率环路更短,高频EMI更低,自动化贴装能力更强
在未来量产机甲平台中,TOLL很可能成为主驱MOSFET的主流方案
---------------------------------------------------------------------------------------------
2.3 四足模式主驱:高爆发电流平台
变形机甲在四足模式下,需要实现:越野稳定,高负载移动,极端地形适应,高瞬态冲击输出
因此需要极低导通阻抗器件。
推荐:VBGQT1801,80V/350A,1mΩ超低阻,TOLL封装
1mΩ级MOSFET对于降低铜损与热损耗至关重要。
在大电流场景下:导通损耗P≈I²R。
当电流达到200A以上时,即便0.5mΩ差异,也会带来数十瓦热损耗差距。
因此超低阻已经成为重载机器人平台的关键指标。
-----------------------------------------------------------------------------------------------------
三、机器人辅助系统MOSFET架构
3.1 灵巧手与微型执行器系统
可载人机甲并不仅仅依赖大功率关节。其精密操作能力同样重要。包括:
灵巧手,微型舵机,机械手指,微型FOC控制,云台机构
这些系统特点是:高频PWM,小体积,高集成度,多通道控制
推荐采用:VBQF3410,VBQF3620G,DFN3x3封装,Half-Bridge集成架构
Half-Bridge集成MOS方案可以显著降低:PCB面积,栅极驱动复杂度,EMI问题,开关回路寄生参数
对于拥有数十个自由度的机甲机器人而言,小型化MOS架构至关重要。
-----------------------------------------------------------------------------------------------------
3.2 GPU与AI供电系统
2026年的机甲机器人已经不仅仅是运动平台。
它更像是一台“移动AI计算中心”。平台通常集成:
AI视觉推理,多传感器融合,激光雷达建图,实时运动规划,大模型边缘计算
GPU与AI模组功耗可达到:1kW以上
因此VRM供电系统已经接近服务器级别。
推荐采用:VBQF1305,30V低压MOS,DFN8(3x3),低Qg高频优化
GPU供电MOS通常要求:高频低损耗,极低寄生,高电流密度,优秀热扩散能力,其开关频率可能达到数百kHz以上。
因此传统大封装MOS并不适合AI供电系统。
--------------------------------------------------------------------------------------------------------
3.3 传感器与航电系统
机甲机器人通常集成:激光雷达,双目摄像头,毫米波雷达,IMU惯导,航电控制模块
这些系统对电源稳定性要求极高。
推荐:VBQA5638,Dual N+P架构,DFN5x6封装
双MOS结构可用于:电源路径切换,冗余供电,ORing保护,高侧负载控制
对于高可靠机器人系统而言,冗余供电已经成为必要设计。
---------------------------------------------------------------------------------------------------------
四、电池平台与高压补能系统
4.1 主电池BMS系统
可载人机甲的电池容量已经远超普通机器人。
部分平台容量甚至达到:数十kWh
因此BMS系统必须具备:高电流保护,热失控隔离,主动均衡,短路保护,热插拔管理
推荐:VBGL71503,150V/216A,TO263-7L封装
机器人平台中的BMS已经开始向新能源汽车BMS架构靠拢。
------------------------------------------------------------------------------------------------------
4.2 主配电PDU系统
在机甲平台中,PDU相当于“移动配电中心”。
负责:功率分配,电子保险丝,故障隔离,母线保护
推荐:VBGL1101,100V/350A,1.2mΩ超低阻
PDU系统中的MOSFET往往长期工作于高电流状态。
因此封装散热能力比单纯参数更重要。
-------------------------------------------------------------------------------------------------------
4.3 无线充电与SiC路线
未来大型机甲平台极有可能采用:无线停靠补能,高频快充,自动能源管理
此时传统硅MOSFET已难以满足高频高压需求。
SiC MOSFET正在成为主流路线。
推荐:VBQT165C100K,VBP165C100-4L,650V SiC MOS
SiC器件优势包括:高频损耗更低,Qrr极低,开关速度更快,高温性能更强,磁性器件体积更小
尤其在:LLC谐振,PFC,高频无线充,高压辅助逆变等系统中优势明显。
--------------------------------------------------------------------------------------------------
五、热管理与可靠性设计
5.1 机甲平台的热设计难点
可载人机器人内部空间非常有限,但系统功率却极高。因此热设计成为最大挑战之一。
MOSFET热源主要来自:导通损耗,开关损耗,寄生振荡,二极管反向恢复
解决方案包括:铜底板液冷,Vapor Chamber均热板,双面散热PCB,高导热灌封,铜夹封装MOS
其中TOLL、TOLT、LFPAK56等封装,已经明显优于传统TO封装。
-------------------------------------------------------------------------------------------------
5.2 高频EMI问题
机器人平台通常拥有:高速FOC,高频DC-DC,GPU供电,多路无线通信,EMI问题极其严重。
MOSFET选型需要重点考虑:Qg,Qgs/Qgd比例,寄生电感,封装回路,dv/dt控制能力
否则容易导致:雷达干扰,AI系统异常,编码器误触发,通信不稳定
因此高频优化MOS在机器人领域价值越来越高。
----------------------------------------------------------------------------------------------------
六、容易被忽略但非常关键的MOSFET模块
在大型可载人机甲平台中,除了主驱、BMS以及AI供电系统之外,还有一部分容易被忽略的小功率与辅助系统。
虽然这些模块单颗功率不高,但数量庞大、运行时间长,并且直接关系到整机可靠性。
6.1 热插拔与浪涌保护模块
由于机甲平台具备:高压母线,大容量电池,多路储能系统,再生制动能量回灌
因此在上电瞬间极容易产生浪涌电流。
如果缺少热插拔控制:MOSFET容易击穿,母线电容冲击严重,控制器寿命下降,连接器容易烧蚀
推荐采用:VBGQTA11503,TOLT-16封装,强SOA能力
其优势在于:大脉冲耐受能力,高雪崩能力,短时热冲击能力强
非常适合机器人高压母线预充与热插拔场景。
------------------------------------------------------------------------------------------------
6.2 48V DC-DC辅助能源系统
大型机甲平台通常并非单一电压架构。常见包括:
400V主动力平台,48V辅助动力平台,24V控制平台,12V航电系统,5V/3.3V逻辑系统
因此需要大量高频DC-DC变换器。
推荐:VBGED1401,LFPAK56封装,40V/0.7mΩ
其特点包括:高频同步整流效率高,超低导通损耗,高频开关性能优秀
特别适用于:Buck同步整流,多相降压,电池辅助供电
-----------------------------------------------------------------------------------------------------
6.3 液冷循环系统
大型可载人机甲热密度极高。
很多平台已经开始采用:液冷关节,液冷AI模组,液冷电池系统,液冷功率桥
因此液冷泵长期处于连续运行状态。
推荐:VBED1402,LFPAK56封装,40V/2mΩ
该器件具备:长时间连续运行稳定性,高频PWM适配能力,良好的热循环寿命
非常适合机器人液冷循环系统。
------------------------------------------------------------------------------------------------
6.4 风扇与热风道控制系统
除了液冷之外,机甲内部通常还会部署:GPU风扇,电池散热风道,驱动器风冷系统,座舱散热系统
推荐:VBQF3620G,Half-Bridge集成结构
其优势在于:降低驱动复杂度,PCB占用更小,高频PWM噪声更低,尤其适合静音型智能风冷系统。
----------------------------------------------------------------------------------------------
6.5 安全冗余与高侧隔离模块
可载人机器人相比普通机器人,对安全性的要求更高。
系统通常需要:冗余断电,故障隔离,双路供电切换,紧急脱离控制
推荐:VBQG2658,DFN6(2x2),P沟道MOS结构
适用于:高侧保护,安全隔离,逻辑冗余控制
-----------------------------------------------------------------------------------------------
6.6 双电池与ORing电源管理系统
未来高端机甲平台很可能采用:主动力电池,AI独立电池,应急备用电池
因此需要双电源路径管理。
推荐:VBQA5101M,Dual N+P架构
可用于:双电池切换,ORing防反灌,热备份供电,故障自动切换
这是未来高可靠机器人平台的重要趋势。
----------------------------------------------------------------------------------------------------
机甲机器人正在重塑功率半导体需求
2026年的可载人变形机甲机器人,已经不再是单纯的“机器人升级版”,而是一种融合:
新能源汽车,工业伺服,航空电子,AI边缘计算,高可靠电源系统的新型复杂平台。
而MOSFET,则是整个系统最核心的基础器件之一。
从主驱关节到灵巧手,从AI供电到无线充电,从BMS到高压补能,MOSFET几乎贯穿整个平台的所有关键系统。
未来机器人产业的发展,也将持续推动:超低阻MOS,高频低损耗MOS,高可靠车规级MOS,SiC MOSFET,高集成智能功率模块快速演进。
可以预见,未来的可载人机甲机器人,将成为继新能源汽车之后,功率半导体行业新的超级增长市场。
2026慕尼黑上海电子展 · 技术邀约
展位号:N5.150
时间:2026年7月1日-3日
地点:上海新国际博览中心
随着可载人变形机甲从概念走向工程化,功率器件的选型已成为整机性能突破的关键。一台GD01类机甲,MOSFET用量高达400~800颗,涵盖髋关节主驱、四足模式爆发控制、AI算力供电、高压快充及SiC谐振拓扑等数十个核心模块。
无论您是机器人整机工程师、动力系统架构师,还是供应链技术决策者,都欢迎莅临N5.150展位,现场交流选型痛点,获取专属选型速查表与样品支持。
诚挚邀请您拨冗出席,共同探索功率半导体如何驱动下一代智能机甲。
VBsemi 技术团队 | 展位 N5.150
2026年7月1日-3日,上海见!